0. TL;DR
- 제품: 건설 현장에서 타워크레인 지브 간 충돌 위험이나 구역 이탈을 실시간 분석하고
운전자에게 경고하는 안전 시스템 - 언어: C/C++ (Jetson 시스템 SW), C (STM32 펌웨어), C++ (Qt GUI)
- 플랫폼: NVIDIA Jetson, STM32 (ARM Cortex-M3)
- 담당: 타워크레인 GUI 전체 설계. GPS RTK 기반 타워크레인 지브 충돌 방지 로직 설계,
STM32 센서 펌웨어 설계, Qt GUI 모니터링 프로그램. 건설현장 납품 운용 중
1. 시스템 개요
타워크레인 구조물에 부착된 GPS 및 각종 센서를 이용하여 현재 크레인의 좌표를 구하여 표시하고, 인근 크레인과의 SubGHz 통신을 통해 좌표를 받아서 충돌 위험 및 각종 위험을 계산하여 운전자에게 경고하는 시스템

2. GPS RTK 개요
일반 GPS의 경우 미터 급의 오차를 지니는데 반해, GPS RTK의 경우 센티 미터 급의 오차를 지니는 정밀 측위 기술입니다.
cm 급의 보정 데이터를 받기 위해 NTRIP을 이용하였습니다.
우선 GPS 수신기가 미터급의 위치 정보를 수신하면 국토지리정보원의 VRS로 NMEA GGA인 대략적인 위치를 보내게 되고, VRS에서 보정된 데이터가 RTCM으로 오게 됩니다.
이 때 Fix Quality가 0,1,2,4,5의 값을 가질 수 있는데 4, 5가 나와야 Fix됨을 의미합니다.
Fix Quality가 0이면 GPS의 신호를 믿을 수가 없으므로 에러처리를 하고 사용자에게 알리는 방식을 취하였습니다.
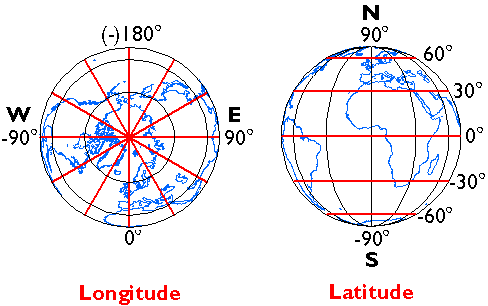
3. GPS 위도 경도 좌표 시각화
Equirectangular 방식을 활용하여 직교 좌표계로 변환할 수 있었습니다.
우선, 위도와 경도는 아래 그림과 같이 표현이 됩니다.
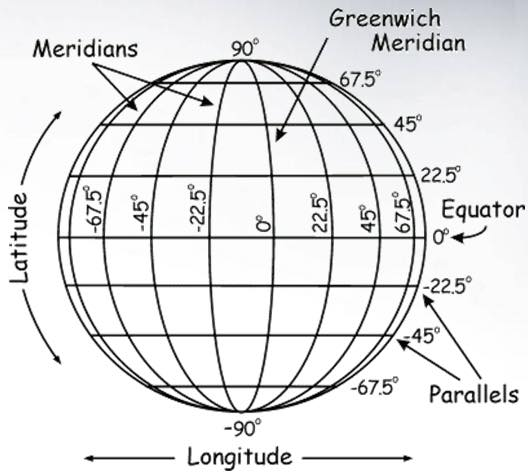
지구는 적도 부분이 더 부풀어있는 타원체(WGS84)이기 때문에 아래의 공식이 성립하게 됩니다.
6,378,137 × π / 180 ≈ 111,319.5 m/도
이를 통해 다음과 같은 공식으로 위도에 따른 경도를 구할 수 있습니다.
dLon = 111320 · cos(Lat)
이에 따라 위도 1도당 m와, 경도 1도당 m를 구할 수 있고 직각 좌표계로 매핑할수 있었습니다.