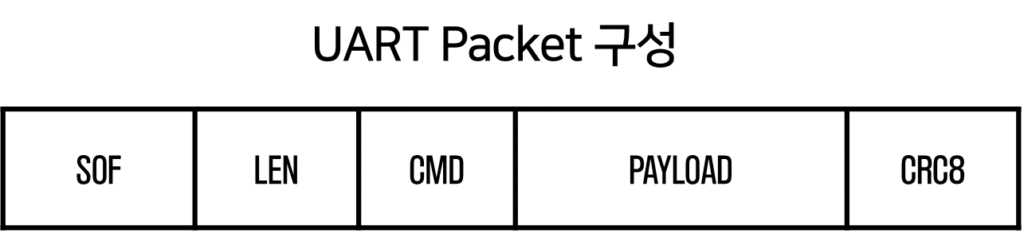
[STM32] IMU 기반 BalancingBot with PID SOF: Start Of Frame (0xAA) LEN: PAYLOAD길이 CMD: 명령/응답 코드 PAYLOAD: 가변 길이 데이터 CRC8: 통신 중 발생한 데이터 오류 검출(여기선 단순하게 XOR 연산 활용)