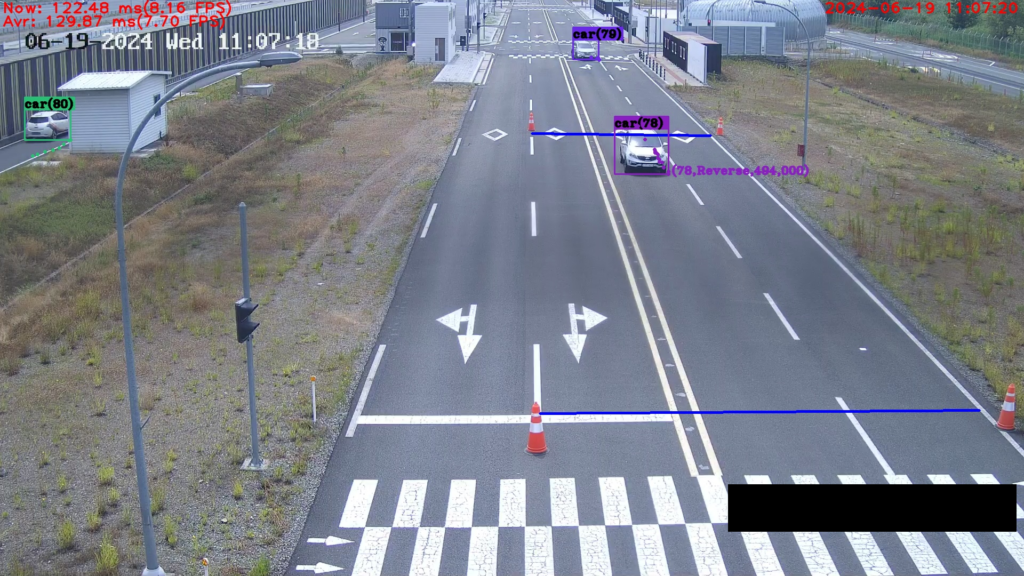
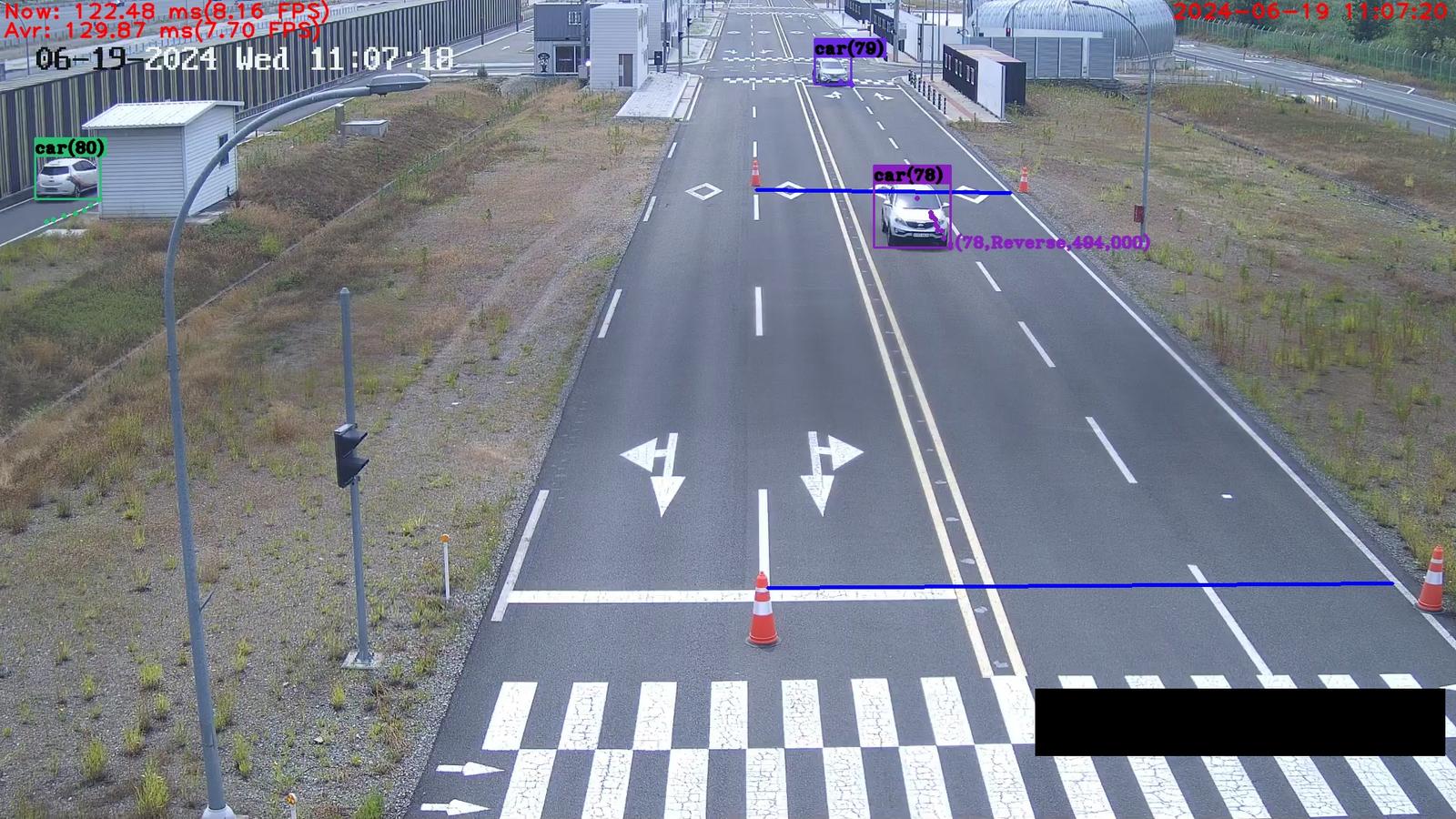
YOLOv4 기반 역주행 방지 시스템 0. TL;DR 제품: 도로에 카메라 영상을 실시간 분석하여 차량의 방향성을 판단하고 역주행의 경우 운전자에게 경고하는 시스템 언어: C/C++ (Darknet, DeepStream SDK), Python (모델 학습) 플랫폼: NVIDIA Jetson, STM32 (ARM Cortex-M) 담당: YOLOv4 데이터셋 구축 및 모델 학습, 실시간 추론 파이프라인 개발, STM32 펌웨어 일부 개발